Project : Motion Capture Interpolation
Semester : Spring 2012
Platform : Visual C++
Course : Computer Animation and Simulation
Instructor : Prof. Jernej Barbič (http://www-bcf.usc.edu/~jbarbic/)
Implemented interpolation schemes to interpolate human motion data obtained from an optical mocap system. Two data files generated by the optical mocap system were provided: ASF file, which encodes the skeleton kinematics and AMC file, which stores the motion in time.
Two angles representations were used :
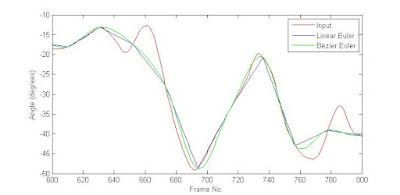
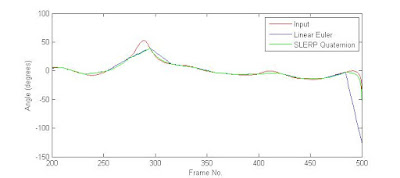
Graphs showing comparison of interpolation techniques (interpolated between every 20 frames) :


Implemented interpolation schemes to interpolate human motion data obtained from an optical mocap system. Two data files generated by the optical mocap system were provided: ASF file, which encodes the skeleton kinematics and AMC file, which stores the motion in time.
Two angles representations were used :
- Euler Angles
- Quaternions
Interpolation techniques implemented :
- Linear interpolation for Euler angles
- Bezier interpolation for Euler angles
- SLERP interpolation for Quaternions
- Bezier SLERP interpolation for Quaternions
Demo video shows the input motion (in red) and the interpolated motion (in green). The interpolation is between every 40 frames.
Mocap Interpolation (1) from Somya Sharma on Vimeo.
Graphs showing comparison of interpolation techniques (interpolated between every 20 frames) :

Linear Euler vs Bezier Euler interpolation for lfemur joint

SLERP Quaternion vs Bezier SLERP Quaternion interpolation for lfemur joint

Linear Euler vs SLERP Quaternion interpolation for root joint

Bezier Euler vs BEzier SLERP Quaternion interpolation for root joint